The goal of this research program is to understand how the mechanical properties of skin affect the mechanical and thermal inputs delivered via various actuator technologies. We have fabricated accelerometer arrays to measure the vibration at the position of the actuator and the propagation of surface waves from this location across the skin. These waves can influence the ability to localize a point of stimulation in a tactile display. We have found that there are significant differences in the frequency and amplitude of oscillation of an actuator depending on whether it is mounted on glabrous or hairy skin and that surface waves can be detected 25 mm from the initial point of stimulation. We have also developed a dynamic mechanical testing device that measures the linear dynamics of the skin and quantified the greater stiffness and damping of glabrous as compared to hairy skin.

Accelerometer Array to Measure Surface Waves
In designing both tactile and thermal displays it is important to tailor the device to the area of skin on which it will be mounted and to understand why the same input may not be perceived similarly at different sites on the body. For this purpose, we have measured the surface roughness of the finger pad so that it can be incorporated in our thermal models of hand-object interactions and found that it leads to better predictions of the changes in skin temperature. With our skin mechanical testing devices, we have measured the mechanical properties of skin and determined how these change across the body and with varying levels of skin hydration.

Skin Mechanical Testing Device
When we haptically explore an object, information about its properties arises from finger movements that impose forces on the object and indicate its shape and properties such as weight, compliance or material composition. The forces used during manual exploration vary as a function of the property being perceived. We have measured how skin temperature changes with contact force and surface area related these to the perception of the spatial properties of stimuli. We have also analyzed the displacement and force of movements made when perceiving stiffness or viscosity.
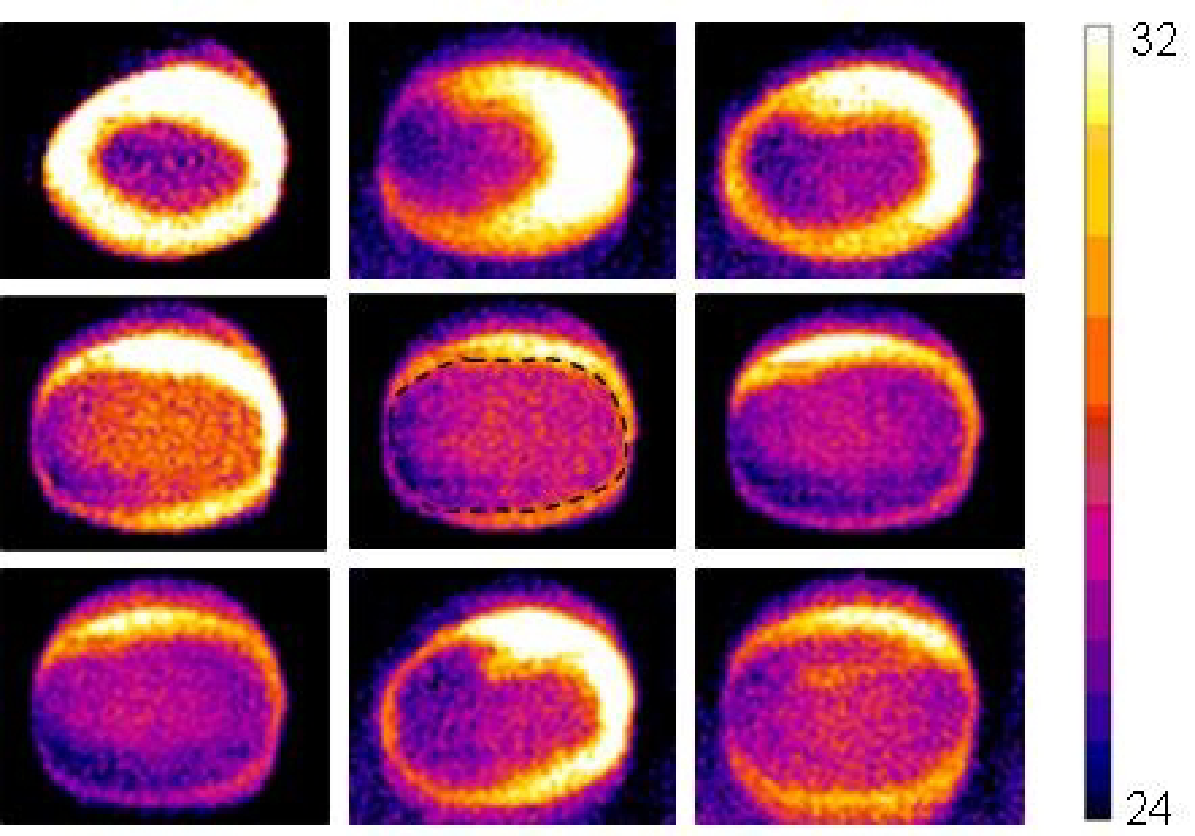
Thermal Image of a Finger as a Function of Contact Force